Edison Robotik: Lektion 3
Arbeitsblatt 3.1 - Rechts drehen
In dieser Lektion musst du ein Programm
schreiben, mit dem dein Edison-Roboter sich nach rechts dreht.
Schau
dir folgendes Programm an:

Schau
dir Zeile 13 des Programms an. Denke daran, dass die Ed.Drive-Funktion
drei Eingabeparameter hat: Richtung, Geschwindigkeit und Entfernung. In
diesem Programm ist der Entfernungsparameter keine Zahl, sondern
"degreesToTurn". Dies ist eine Variable. In Python sind Variablen
reservierte Speicherorte zum Speichern von Werten. Dies bedeutet, dass
du beim Erstellen einer Variablen etwas Platz im Speicher des Programms
reservieren musst. Eine Variable stellt einen Wert dar, der irgendwo in
deinem Programm festgelegt ist.
Schauen dir Zeile 12 des Programms
an. Hier wird der Wert von "degreesToTurn" eingestellt. Dies wird als
Zuweisen eines Werts zu einer Variablen bezeichnet. In Python wird das
Gleichheitszeichen (=) verwendet, um Variablen Werte zuzuweisen. Du
kannst Variablen verwenden, um Werte zu speichern, die an mehreren
Stellen in einem Programm verwendet werden. Dies kann sehr hilfreich
sein, insbesondere wenn sich der Wert einer Variablen ändert. Wenn du
Variablen verwendest, muss du nur die Änderung in einer Codezeile
vornehmen, um den Wert überall dort anzupassen, wo diese Variable in
deinem Programm verwendet wird.
Du bist dran:
Schreibe das Programm, lade es herunter
und führe es mit deinem Edison aus. Verwende Übungsblatt 3.1 oder
farbiges Klebeband, um die Start- und Endwinkelmarkierungen auf einem
Schreibtisch oder dem Boden als Testfläche für dein Programm zu
markieren.
1. Beschreibe, was der Roboter tut und warum er dies tut,
wenn du das Programm ausführst. Füge am Ende deines Programms (nach
Zeile 13) eine neue Zeile hinzu, und füge deinem Programm den folgenden
Code hinzu:
Ed.Drive (Ed.SPIN_LEFT, Ed.SPEED_6, degreesToTurn)
Lade das Programm herunter und führe es mit deinem Edison in deinem
Testbereich aus.
2. Beschreibe, was der Roboter tut und warum er dies
tut, wenn du das aktualisierte Programm ausführst. Bearbeite nun dein
Programm so, dass sich dein Edison zuerst um 180 Grad nach rechts und
dann um 180 Grad nach links dreht.
Hinweis: Denke daran, dass du den
Wert der Variable degreesToTurn ändern können.
Lade dein
aktualisiertes Programm herunter und führe es mit deinem Edison in
deinem Testbereich aus, um festzustellen, ob deine Änderung erfolgreich
war.
3. Welche Zeile oder Zeilen in deinem Programm hast du geändert?
Notiere die aktualisierten Zeilen. Variablennamen müssen in Python
bestimmten Regeln folgen. Zum Beispiel sind keine Sonderzeichen wie #
oder $ erlaubt. Versuche , den Namen der Variablen "degreesToTurn" zu
ändern. Experimentiere mit verschiedenen möglichen Namen und verwende
die Schaltfläche "Code prüfen", um herauszufinden, welche Namen zulässig
sind und welche nicht.
4. Nenne zwei Beispiele für unzulässige
Variablennamen, die du entdeckt hast.
Arbeitsblatt 3.2 - 180 ° nach links drehen
In diesem Teil musst du zwei verschiedene
Programme schreiben, um deinen Edison-Roboter genau um 180 ° nach links
zu drehen.
Du bist dran:
Aufgabe 1: Biege genau um 180 ° nach
links ab
Schreibe ein Programm, mit dem sich dein Edison-Roboter
genau um 180 ° nach links dreht.
Tipp: Versuche, das im Arbeitsblatt
3.1 verwendete Programm als Ausgangspunkt zu verwenden.
Lade dein
Programm herunter und teste es mit Übungsblatt 3.1 oder farbigem
Klebeband, um die Winkelmarkierungen „Start“ und „Ende“ auf einem
Schreibtisch oder dem Boden als Testfläche für dein Programm zu
markieren. Denke daran, mit deinem Programm zu experimentieren.
Wenn sich dein Edison nicht genau um 180 ° dreht, passe die
Eingabeparameter an und teste erneut.
Mit welchen Eingabeparametern
hast du den Roboter genau um 180 ° gedreht? Wenn du eine Variable
verwendet hast, gib an, welchen Wert du dieser Variablen zugewiesen
hast.
Aufgabe 2: Mit dem Befehl Ed.DriveRightMotor () exakt um 180 °
drehen
EdPy hat einen Befehl namens "Ed.DriveRightMotor ()", der nur
Edisons rechten Motor in Bewegung versetzt. Wenn sich nur der richtige
Motor bewegt, in welche Richtung dreht sich Edison? Halte Edison in
deinem Händen und ahme nach, was passieren wird, wenn sich nur der
richtige Motor bewegt. Suche im Dokumentationsfenster der EdPy-App nach
dem Befehl Ed.DriveRightMotor (), um zu sehen, wie diese Funktion
funktioniert.
Schreibe dann ein Programm, mit dem dein Roboter mit
der Funktion Ed.DriveRightMotor () um 180 ° nach links gedreht werden
kann. Mit welchen Eingabeparametern hast den Roboter mit dem
Befehl Ed.DriveRightMotor () genau um 180 ° nach links gedreht?
Arbeitsblatt 3.3 - Rechts abbiegen, dann
links abbiegen
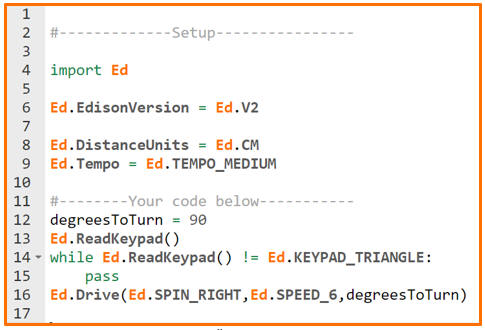
In dieser Einheit musst du ein Programm schreiben,
damit sich dein Edison-Roboter dreht, wenn die Dreieck-Taste gedrückt
wird.
Schreibe folgendes Programm:
Lade
Programm herunter und teste es mit Übungsblatt 3.1 oder farbigem
Klebeband, um die Winkelmarkierungen „Start“ und „Ende“ auf einem
Schreibtisch oder dem Boden als Testfläche für dein Programm zu
markieren.
Du bist dran:
Schreibe ein Programm, mit dem der
Roboter genau um 90 ° nach rechts gedreht wird, wenn die Dreieckstaste
einmal gedrückt wird, und drehe dann genau um 270 ° nach links, wenn die
Dreieckstaste ein zweites Mal gedrückt wird.
Denke daran,
Ed.ReadKeyPad () in die Zeile über jeder "while" -Schleife einzufügen,
um alle vorherigen Tastendrücke vor der Schleife zu löschen. Wie
sieht dein Programm aus? Schreibe Code.
Arbeitsblatt 3.4 -
Minilabyrinth
In dieser einheit musst du ein Programm schreiben, mit
dem dein Edison-Roboter erfolgreich durch ein Labyrinth navigieren kann.
Du bist dran:
Schreibe ein Programm, damit dein Edison-Roboter durch
das Mini-Labyrinth auf Übungsblatt 3.2 fährt, wenn du die
Wiedergabetaste (Dreieck) drückst.
Um das Labyrinth erfolgreich
abzuschließen, musst du:
• Edison hinter der Startlinie starten
lassen,
• Edison nach dem Überqueren der Ziellinie anhalten lassen
und
• Halte Edison innerhalb der Grenzlinien des Labyrinths.
Verwende die Programmierkenntnisse des Roboters, die du bisher gesammelt
hast, um ein Programm zu schreiben, das mehrere Funktionen verwendet,
damit Edison die Züge des Labyrinths bewältigen kann.
Ed.Drive ()
Ed.SPIN_RIGHT Ed.FORWARD Ed.SPIN_LEFT
Hinweise:
1. Beschreibe
die Abfolge der Bewegungen, die dein Roboter ausgeführt hat, um das
Labyrinth zu vervollständigen.
2. Was hat dir das Schreiben dieses
Programms schwer gemacht?
Herausforderung 1: Rennen!
Wer kommt
am schnellsten durch das Labyrinth, ohne zu schummeln?
Denke daran:
Dein Roboter muss hinter der Startlinie starten, nach der Ziellinie
anhalten und darf keine Grenzlinien überfahren, um zu gewinnen.
3.
Wer ist gefahren? Wer hat das Rennen gewonnen?
4. Was war die Zeit
des Siegerroboters durch das Labyrinth?
Herausforderung 2:
Entwerfe dein eigenes Labyrinth
Gestalte dein eigenes,
herausfordernderes Labyrinth mit ein paar weiteren Kurven, in denen
Edison navigieren kann. Schreibe ein Programm für Edison, um das
Labyrinth erfolgreich abzuschließen. Oder tausche Labyrinthe mit einem
Partner aus und schreibe ein Programm, um das Labyrinth erfolgreich
abzuschließen.
Denke daran: Dein Roboter muss hinter der Startlinie
starten, nach der Ziellinie anhalten und darf keine Grenzlinien
überfahren, um zu gewinnen.
5. Zeichne eine kleine Version des
Labyrinths, das du in der Box fertiggestellt hast.